Roboter sind bekannt für ihre hochgradige Präzision, Perfektion und Zuverlässigkeit – Fähigkeiten, in denen sie den Menschen im Allgemeinen überlegen sind. Umgekehrt lässt sich aber auch sagen, dass Robotern die Kreativität fehlt, die Menschen besitzen – je nachdem, wie Kreativität definiert wird. Auch fehlt es Robotern an sogenannten Softskills, mit denen wir im Laufe von Produktionsprozessen auf die Eigenschaften von Materialien interaktiv einzugehen verstehen; eine Fähigkeit, die bei der Arbeit mit Putz und Zement insbesondere eine wichtige Rolle spielt. Ferner ist, was von Menschenhand geschaffen wurde, einzigartig und nie exakt wiederholbar, weswegen Handarbeit im Allgemeinen als etwas Kostbares angesehen wird. Künstlerische Werke eines Roboters, so perfekt sie auch sein mögen, sind Kopien eines ihnen vorgegeben Programms.
IRoP interactive robotic plastering
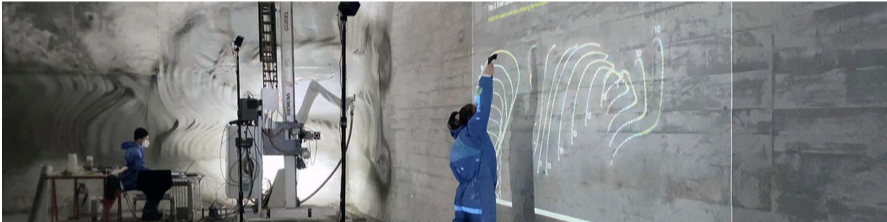
Vor diesem Hintergrund haben Forscher des Architekturdepartements an der ETH in Zürich ein Projekt ins Leben gerufen, bei dem Menschenhand und Roboterarm zusammenarbeiten und einander ergänzen sollen. IRoP, das Ergebnis dieses Projekts, wurde an der CHI 2022 Konferenz in New Orleans in den Vereinigten Staaten präsentiert. IRoP steht für „interactive robotic plastering” und ist ein System, das dem Menschen ermöglicht, von Hand dreidimensionale Designs direkt auf der Baustelle oder im Raum zu zeichnen, die dann als Wandrelief von einem Roboterarm mit Putz an die Wand gedruckt werden (Abb. 1).
Analoges Modellieren und maschinelle Fabrikation
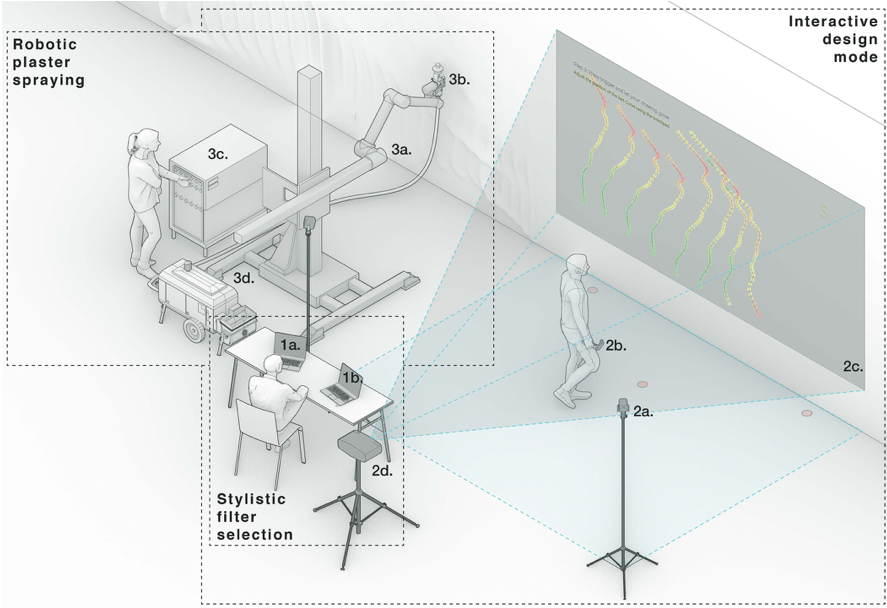
In der Architektur ist die Arbeit mit Robotern und 3D Druck keine Neuheit mehr und es gibt viele Projekte, in denen Roboter für die Produktion komplexer Strukturen eingesetzt werden. Dank ihrer Präzision und technischen Fähigkeiten sind sie in der Lage, auch die feinsten Bauteile sorgfältig zusammenzusetzen und so faszinierende Räume und Ornamente zu schaffen. Parametrische Designwerkzeuge und Algorithmen ermöglichen ein gewisses Maß an künstlerischer und kreativer Freiheit, folgen aber Regeln von Software und Programmiersprache und sind daher nicht so flexibel und intuitiv wie menschliche Handarbeit. Mit IRoP ist es gelungen, eine Brücke zwischen analogem Modellieren und maschineller Fabrikation schaffen. Mit einem Controller und Echtzeit-Projektion vor Ort als Werkzeuge „malen“ die DesignerInnen die Druckpfade, die vom Roboter abgefahren werden sollen, von Hand an die Wände (Abb. 2).
Optimierte Prozesse
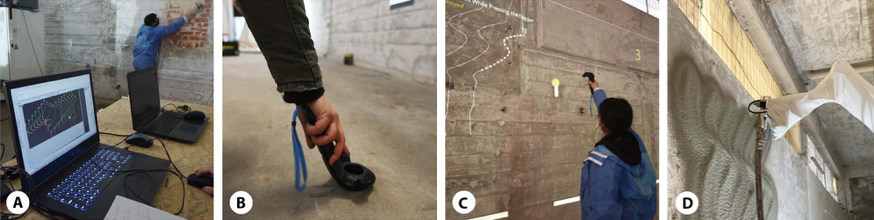
Der Mensch allein täte sich vermutlich schwer, von Hand solch komplexe Formen zuverlässig zu modellieren. Zumindest bedürfte es, ähnlich wie beim parametrischen Designen, professionelle handwerkliche Fähigkeiten und Erfahrung, würde deutlich mehr Zeit in Anspruch nehmen und sich nicht auf dieselbe Weise reproduzieren lassen wie mit einem Roboter. Um solche Formen rein analog und ohne die Hilfe von virtuellen Räumen und Projektionen herzustellen, wird ein Positiv angefertigt. Dieses kann skulptiert werden oder aus einem Negativ – einer Schalung – gegossen werden. Dieses Positiv wird dann mithilfe eines 3D-Scanners in ein digitales Modell übersetzt, um es daraufhin von einem Roboter nachbauen zu lassen. Dieser Vorgang ist sehr material- und arbeitsintensiv. Dank IRoP kann das Bauen eines analogen Positivs und dessen Einscannen übersprungen werden. Das Positiv wird eben mit dem Controller direkt vor Ort an der Wand des Raums gemalt (Abb. 3).
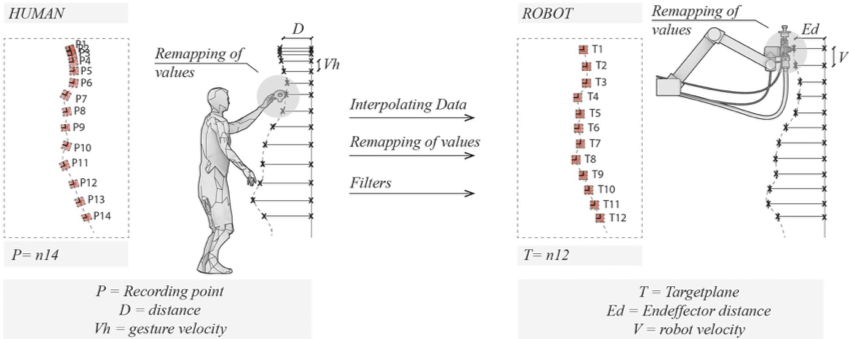
Diese Methode spart viel Material und Zeit und ist vergleichbar mit dem Zeichnen auf einem Tablet, auf dem DesignerInnen handzeichnen, ohne auf analoge Medien und Scanner angewiesen zu sein. Beim Zeichnen auf einem Tablet wird nicht nur Papier und Radiergummi gespart, sondern auch Zeit für Korrekturen und Einscannen, und eine von Menschenhand gefertigte Zeichnung als digitales Ergebnis erzielt, noch während sie am Entstehen ist. Auch Eigenschaften von Stift und Papier lassen sich auf einem Tablet simulieren: Drückt man mit dem Stift fester auf, wird der Strich dunkler oder dicker, je nach Einstellung des Tablets. Bei IRoP bestimmt man die Dicke des Materials beziehungsweise die Anzahl der Schichten (Topografie) in denen es aufgetragen wird, indem man das Werkzeug näher an die Wand heran oder weiter weg von ihr führt, wobei die Handbewegungen im Raum dreidimensional aufgenommen werden (Abb. 4).
Menschliche Kreativität erforschen
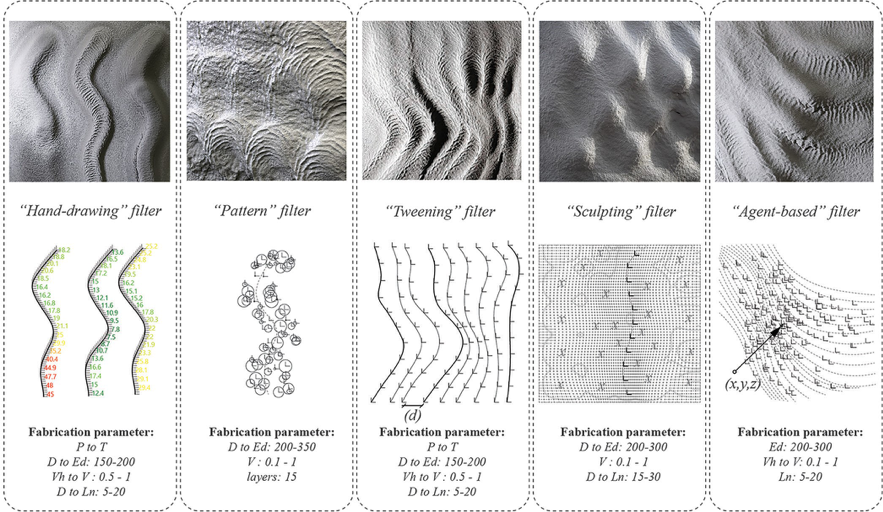
Die Geschwindigkeit der Bewegungen beeinflusst die Dichte des Musters, welches mit der Topografie überlagert wird. Die IRoP Filter sind Teil einer Effekt-Bibliothek, aus der man Muster wählen kann, die mit den handgemalten Pfaden überlagert werden und zusätzliche Gestaltungsmöglichkeiten bieten (Abb. 5). Das Beeindruckende an diesem neuen System – abgesehen von dem ästhetischen Resultat an der Wand – ist, dass das Programm dem Menschen hilft, seine Kreativität selbst zu erforschen und auszubauen und aufregende Formen zu produzieren, ohne notwendigerweise über die handwerkliche und künstlerische Erfahrung im Modellieren oder Programmieren zu verfügen, weil dieser Teil der Arbeit vom Roboter übernommen wird.
IRoP für alle?
Es ist vorstellbar, dass in Zukunft Laien zum Beispiel selbst ihre Wohn- und Außenräume auf diese Weise gestalten. Ein System wie IRoP kann das Arbeiten mit Robotern vom Olymp der Technik und Forschung herunter zu allgemeinen Verbrauchern holen, in eine Welt, in der Roboter nicht einfach den Menschen ersetzen, sondern ihm mit dieser neuen Methode assistieren (Abb. 5). Die ForscherInnen an der ETH arbeiten weiterhin an einer vereinfachten Bedienung von IRoP. Derzeit bedarf es noch einer Vielzahl an Tests und Kalibration, doch das Forschungsteam der ETH arbeitet daran, das System einfacher und benutzerfreundlicher sowie aus der Ferne bedienbar zu machen. Ein solches System wird auch in der näheren Zukunft noch sehr kostspielig sein, doch es ist vorstellbar, dass IRoP eines Tages wie derzeit Rasenmäher oder Vorschlaghammer für Projekte ausleihbar sein wird (Abb. 6).
___
Abbildungen aus Interactive Robotic Plastering: Augmented Interactive Design and Fabrication for On-site Robotic Plastering, von Daniela Mitterberger, Selen Ercan Jenny, Lauren Vasey, Ena Lloret-Fritschi, Petrus Aejmelaeus- Lindström, Fabio Gramazio und Matthias Kohler, ETH Zurich; vorgestellt CHI 2022, New Orleans.
_
Der Text ist unter dem Titel „Künstlerische Intelligenz – von Menschen erdacht und Robotern geschaffen“ erstmals am 19.8.2022 in der Augustausgabe der Zeitung architektur-aktuell erschienen. Wir freuen uns, dass wir diesen auch unseren Leser:innen zugänglich machen können. (redaktion)